Biomechanika miednicy
Pod względem biomechanicznym najważniejszą funkcją układu szkieletowego, mięśniowo-więzadłowego i nerwowego jest możliwość wykonania ruchu w sposób jak najbardziej ekonomiczny i bezpieczny. Znaczącą rolę podczas lokomocji odgrywa miednica. Jest ona połączeniem między tułowiem i kończynami dolnymi. Przenosi ciężar górnej części ciała. Biomechaniczny punkt widzenia wymaga, aby miednicę rozpatrywać razem z odcinkiem lędźwiowym kręgosłupa oraz biodrami. Dlatego mówi się o okolicy lędźwiowo-miedniczno-biodrowej (LMB). Zadaniem tej okolicy jest zapewnienie organizmowi na tyle dużej stabilności, aby mógł on sprawnie i bezpiecznie przenosić obciążenia z jednoczesnym zachowaniem na tyle dużej mobilności, aby spełniać funkcję lokomocyjną. Zadanie to, jak można sobie wyobrazić, nie jest proste i wymaga skomplikowanego i skoordynowanego systemu stabilizacyjno-mobilizującego.
Model stabilności według Panjabiego. Strefa neutralna
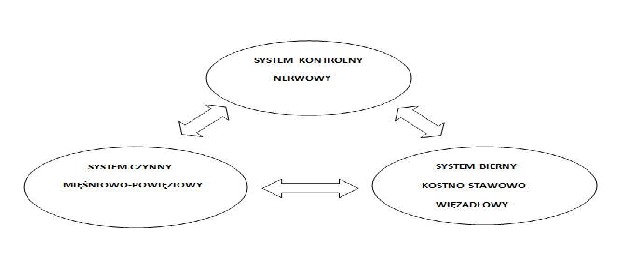
Model stabilizacji ogniw kinematycznych jaki zaproponował Panjabi polega na połączeniu działania trzech układów: nerwowego, mięśniowo-powięziowego i kostno-stawowo-więzadłowego. Sprawność tych trzech układów warunkuje prawidłowe działanie systemu stabilizującego. Kości, stawy i więzadła tworzą system bierny, mięśnie i powięzie system czynny (w tym mięśnie głębokie tułowia, np. mięsień poprzeczny brzucha i mięśnie wielodzielne), natomiast układ nerwowy to system kontrolny, który koordynuje pracę całego mechanizmu stabilizującego. Model ten zakłada, że każdy system ma wpływ na dwa pozostałe i odwrotnie, a nieprawidłowe działanie jednego elementu ma wpływ na działanie całego mechanizmu i prowadzi do kompensacyjnego przeciążenia pozostałych, otwierając drogę do wtórnych dysfunkcji. Tworząc ten model Panjabi miał na uwadze analizę stabilności kręgosłupa, jednak spójność i logiczność tego modelu pozwala z powodzeniem stosować go dla całego organizmu człowieka (ryc. 16) [3, 5, 6, 8, 13].
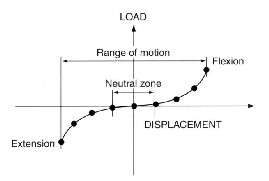
Kolejnym elementem warunkującym stabilność i pozostającym w bezpośrednim związku z powyższym modelem jest zdefiniowane przez Panjabiego pojęcie strefy neutralnej. Strefa neutralna jest to niewielki zakres ruchu w pobliżu położenia zerowego (spoczynkowego) stawu, gdzie ruch odbywa się w zakresie, w którym nie następuje jeszcze pobudzenie proprioreceptorów wokół stawu, a tym samym nie następuje ośrodkowe pobudzenie napięcia mięśniowego (brak informacji dośrodkowej → brak odpowiedzi odśrodkowej), natomiast opór kostno-więzadłowy jest minimalny [8] (ryc. 17).
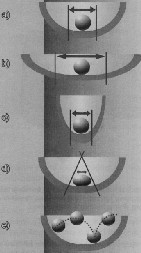
Powiększenie zakresu ruchu strefy neutralnej jest sytuacją niebezpieczną dla stawu. Zbyt późna informacja z proprioreceptorów do układu ośrodkowego o aktualnej pozycji stawu co prawda da odpowiedź ośrodkową w postaci napięcia mięśniowego w danej okolicy, jednak może ona okazać się nieadekwatna do siły zewnętrznej działającej na staw i prowadzić do urazu. Podobnie zmniejszony zakres ruchu strefy neutralnej jest niepożądany. Pobudzenie proprioreceptorów będzie następowało zbyt wcześnie, czego skutkiem będzie zwiększone napięcie mięśni wokół stawu i np. ból. Czynniki, które zaburzają strefę neutralną to np. uraz, procesy zwyrodnieniowe czy osłabienie stabilizacji mięśniowej (ryc. 18).
Przedstawiony powyżej model pokazuje, że stabilność organizmu człowieka jest zjawiskiem dynamicznym zależnym od wielu czynników działających w danym czasie. Czynniki zewnętrzne to siła ciężkości działająca na organizm powodująca występowanie pionowych i poziomych sił ścinających. Czynniki wewnętrzne to spójność układu nerwowego, kostnego, stawowo-więzadłowego i mięśniowo-powięziowego. Oznacza to, że stała, prawidłowa impulsacja aferentna z mechanoreceptorów stawowych i otaczających tkanek miękkich umożliwia prawidłową interpretację ośrodkową impulsów, a przez to stosowną odpowiedź. Zdolność mięśni do długotrwałego skurczu tonicznego i działania w sposób skoordynowany powoduje, że powstała siła w najkorzystniejszy sposób utrzymuje zakres ślizgu w obrębie strefy neutralnej (najmniejsza strata energii) wobec siły zewnętrznej. Mnogość czynników, od których uzależniona jest stabilność, powoduje, że mimo pewnych charakterystycznych i ogólnych cech przedstawionych powyżej pozostaje ona sprawą bardzo indywidualną dla każdego organizmu.
Piśmiennictwo
- Błaszczyk W.: „Biomechanika kliniczna. Podręcznik dla studentów medycyny i fizjoterapii”. Wydawnictwo Lekarskie PZWL, Warszawa, 2004.
- Bochenek A., Reicher M.: „Anatomia człowieka. Tom I. Anatomia ogólna, kości, stawy i więzadła, mięśnie”. Wydawnictwo Lekarskie PZWL, Warszawa, 2006.
- Gnat R., Saulicz E., Kokosz M., Kuszewski M.: „Biomechaniczne aspekty nowoczesnych modeli stabilizacji miednicy. Część I: staw krzyżowo-biodrowy i mechanizm autoryglowania”. „Fizjoterapia Polska”, 2006, 6, 280-288.
- Gnat R., Saulicz E., Kokosz M., Kuszewski M.: „Biomechaniczne aspekty nowoczesnych modeli stabilizacji miednicy. Część II: spojenie łonowe i przednia ukośna taśma mięśniowa”. „Fizjoterapia Polska”, 2006, 6, 328-333.
- Gnat R., Saulicz E., Kuszewski M.: „Współczesne poglądy na temat systemów stabilizacyjnych kompleksu biodrowo-miedniczno-lędźwiowego”. „Fizjoterapia”, 2006, 14, 3, 68-81.
- Gnat R., Saulicz E., Kuszewski M.: „Zaburzenia funkcjonowania systemów stabilizacyjnych kompleksu biodrowo-miedniczno-lędźwiowego”. „Fizjoterapia”, 2006, 14, 3, 83-91.
- Jorritsma W.: „Anatomia na żywym człowieku. Wstęp do terapii manualnej”. Urban & Partner, Wrocław, 2004.
- Lee D.: „Obręcz biodrowa”. DB Publishing, 2001.
- Lee D.: „Principles of the Integrated Model of Function and its Application to the Lumbopelvic-hip Region”. http://dianelee.ca/articles/articles.php.
- Myers T. W.: „Anatomy trains. Myofascial Meridians for Manual and Movement Therapists”. Churchill Livingstone, 2001.
- Oatis C. A.: „Kinesiology. The Mechanics and Pathomechanics of Human Movement”. Lippincott Williams & Wilkins, 2004.
- Perry J.: „Gait Analysis: Normal and Pathological Function”. Slack Inc, 1992.
- Richardson C., Hodges P., Hides J.: „Therapeutical Exercise for Lumbopelvic Stabilization. A Motor Control Approach for the Treatment and Prevention of Low Back Pain”. Churchill Livingstone, 2004.
Przygotował: Bartosz Kmita



