Kinetyka i kinematyka lędźwiowego odcinka kręgosłupa
Z mechanicznego punktu widzenia każdy kręg lędźwiowy posiada 12 stopni swobody.
Ruchy mogą odbywać się w 3 płaszczyznach i 3 osiach.
Wokół osi ruchy te to:
- zgięcie/wyprost (oś czołowa),
- zgięcie boczne w lewo/zgięcie boczne w prawo (oś strzałkowa)
- rotacja w lewo/rotacja w prawo (oś podłużna).
Natomiast ruchy wzdłuż osi to:
- przesunięcie równoległe bocznie/przesunięcie równoległe przyśrodkowo (oś czołowa),
- translacja tylno-przednia/translacja przednio-tylna (oś strzałkowa),
- dystrakcja/kompresja (oś podłużna).
Oczywiście model ten nie uwzględnia czynników anatomicznych, które modyfikują ruch teoretycznie możliwy (ryc.19) [1, 8].
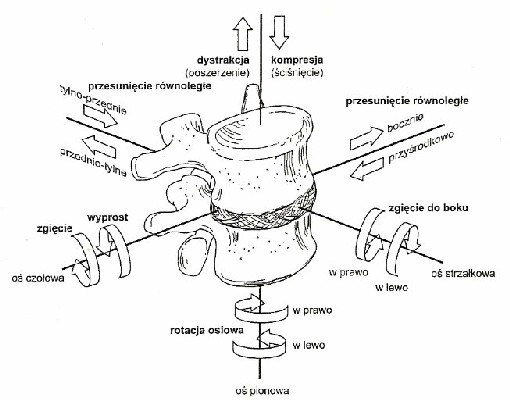
Ryc.19 Dwanaście teoretycznych stopni swobody kręgu lędźwiowego. Osie i ruchy w nich zachodzące.
Praktycznie połączenie krzyżowo-lędźwiowe wydaje się posiadać 4 stopnie swobody.
Zgięcie skojarzone z tylno-przednią translacją i wyprost skojarzony z przednio-tylną translacją dają pierwsze 2 stopnie swobody.
Ten skojarzony ruch kręgosłupa lędźwiowego zachodzi podczas jego zginania i wyprostu.
Wraz ze zgięciem dochodzi do tylno-przedniej translacji kręgu (około 1-3mm).
To powoduje, że oś dla kątowego ruchu zginania podczas jego wykonywania jest ruchoma i przemieszcza się do przodu.
Podczas wyprostu następuje sytuacja odwrotna (ryc. 20) [8].
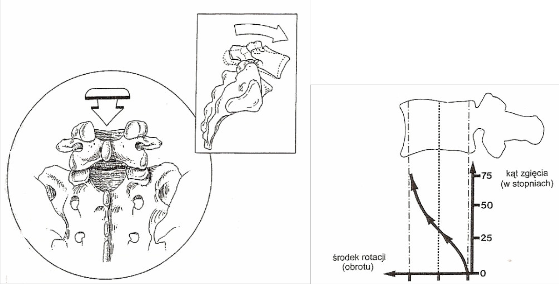
Ryc.20 Ruch tylno-przedniej translacji. Oraz przesunięcie osi czołowej zgięcia/wyprostu, do przodu wraz ze wzrostem zgięcia [8].
Zgięcie boczne w prawo/rotacja skojarzone z przyśrodkowo-boczną translacją oraz zgięcie boczne w lewo/rotacja skojarzone z przyśrodkowo-boczną translacją dają kolejne 2 stopnie swobody.
Wiadomo powszechnie, że zgięciu bocznemu zawsze towarzyszy rotacja.
Kwestią sporu jest jej kierunek.
Z przeprowadzonych badań (Pearcy i Tibrewal 1984) wynika, że poziom L5/S1 zawsze rotuje się zgodnie z kierunkiem zgięcia bocznego.
Poziomy powyżej L4/L5 rotują się w stronę przeciwną do zgięcia bocznego, natomiast poziom L4/L5 uznano za przejściowy, który raz rotuje się jak segmenty leżące poniżej, a raz jak segmenty leżące powyżej (ryc. 21) [8].
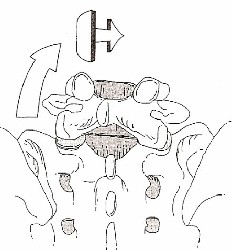
Ryc.21 A - Poziom L5/S1. Ruch zgięcia tułowia w prawo powoduje zgięcie boczne kręgu L5 w prawo i jego rotację w prawo [8]. B - Ten sam ruch tułowia na poziomie L3/L4 powoduje zgięcie boczne kręgu w prawo i jego rotację w lewo [8].
Wyżej wymienione badania były przeprowadzane w pośredniej pozycji kręgosłupa co powoduje, że brakuje analizy jak kręgi rotowały się podczas zgięcia do boku w pozycji zgięciowej lub wyprostnej kręgosłupa.
Według Bogduka, jednego z autorytetów w tej dziedzinie, czysta rotacja osiowa lędźwiowego segmentu ruchowego jest możliwa jedynie do 3 stopni (najmniejsza na przejściu lędźwiowo-krzyżowym stopniowo zwiększająca się im wyższy segment lędźwiowy).
Po przekroczeniu 3 stopni rotacji początkowa oś ruchu przebiegająca pionowo przez tylną część trzonu kręgowego przemieszcza się do stawu międzykręgowego po stronie przeciwnej do rotacji (staw ten znajduje się w kompresji natomiast torebka przeciwnego jest rozciągana).
Teraz kręg leżący powyżej obraca się względem tej osi w kierunku tylno-bocznym jeszcze powiększając kompresję jednego stawu i rozciąganie torebki drugiego.
Dalszy ruch może powodować uraz.
Bogduk zgadza się z wynikami badań przedstawionymi powyżej, jednocześnie zaznaczając, że występują indywidualne odrębności, które zaprzeczają istnieniu jakichkolwiek zasad ruchomości odcinkowej.
Mnogie badania nad tą ruchomością potwierdzają, że zmienia się ona pod wpływem wielu czynników m.in. wieku i procesów zwyrodnieniowych (Farfan 1986, Panjabi, White 1978, Gilmore 1986).
Dlatego nawet jeśli w przyszłości biomechanika odcinka lędźwiowego zostanie rozstrzygnięta to wielość czynników wpływających na jej zmianę powoduje, że dokładne badanie kliniczne pacjenta staje się najprostszym i najlepszym sposobem oceny klinicznej tego odcinka mimo braku obiektywności [8].
Rozwiązaniem powyższego problemu wydaje się być stwierdzenie, że jest on niemożliwy do rozwiązania.
Kinetyka kręgosłupa lędźwiowego
Funkcją kręgosłupa lędźwiowego pod względem analizy kinetycznej jest przeciwstawianie się ściskaniu, skręcaniu i tylno-przedniemu ślizgowi.
Możliwe to jest dzięki prawidłowej budowie anatomicznej tej okolicy oraz mechanizmie stabilności opisanym powyżej [8, 11].
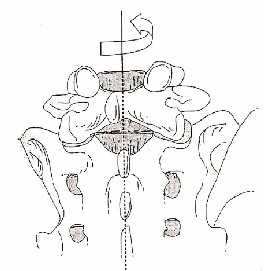
Odcinek lędźwiowy podlega kompresji (ściskaniu) gdy dwie siły działają przeciwstawnie wobec siebie (ryc.26).
Ryc.26 Kompresja trzonów kręgów na poziomie L5/S1 [8].
W segmencie ruchowym odcinka lędźwiowego główny opór sile ściskającej stawia układ trzon kręgu/krążek międzykręgowy (około 80% lub więcej), pozostałe 20% obciążenia przenoszone jest przez stawy międzykręgowe, jednak jest to zależne od stopnia lordozy.
Spowodowane to jest pionową orientacją powierzchni stawowych stawów międzykręgowych.
Większy udział w przenoszeniu obciążenia stawy te mają podczas wyprostu kręgosłupa lędźwiowego, kiedy to dolny wyrostek stawowy kręgu leżącego powyżej wywiera kompresję osiową w stawie.
Warto zauważyć, że strukturą, która jako pierwsza poddaje się przeciążeniom kompresyjnym jest chrząstka szklista blaszki granicznej.
Jest ona więc słabsza od jej obwodowych części, a także od jądra miażdżystego i pierścienia włóknistego [8, 11].
Można to zinterpretować jako swoisty mechanizm obronny, gdzie przy zbyt dużych obciążeniach zniszczeniu ulega blaszka graniczna, a nie pierścień włóknisty.
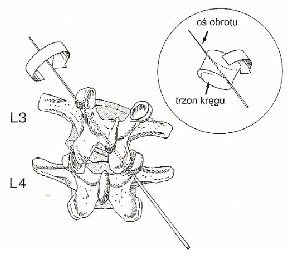
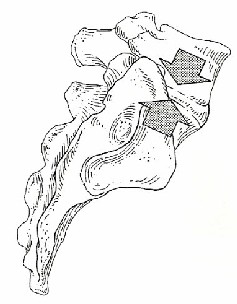
Skręcanie w odcinku lędźwiowym następuje gdy trzon obraca się wokół pionowej osi przebiegającej przez jego środek (ryc.27).
Ryc.27 Skręcanie osiowe kręgu L5 [8].
Sile tej przeciwstawiają się struktury anatomiczne w obrębie łuku kręgowego oraz układ trzon kręgu/krążek międzykręgowy [8, 11].
Warstwowa budowa pierścienia włóknistego oraz ułożenie włókien kolagenowych w poszczególnych warstwach pod kątem około 90 w stosunku do poprzedniej warstwy, powoduje, że struktura ta skutecznie opiera się siłą na nią działającym (ryc.28) [12].
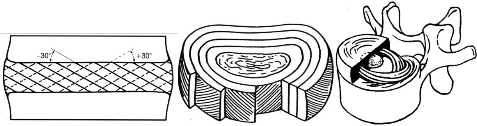
Ryc.28 Warstwowa budowa pierścienia włóknistego [7].
Strukturą, która istotnie wpływa na przeciwstawianie się sile skręcającej w połączeniu lędźwiowo-krzyżowym i całym odcinku lędźwiowym jest więzadło biodrowo-lędźwiowe.
Istotna jest również długość wyrostka poprzecznego kręgu L5 do, którego więzadło się przyczepia.
Im jest on dłuższy tym więzadło ma większą zdolność do przeciwstawiania się sile skręcającej, działając na większej dźwigni [8].
Jednak aby odcinek lędźwiowy był skutecznie stabilizowany podczas wykonywania ruchów rotacyjnych potrzebna jest również czynna stabilizacja, opisana poniżej.
Kolejnym rodzajem siły działającej na omawianą okolicę jest siła ścinająca (tylno- przednie ścinanie).
Do ścinania dochodzi gdy dwie przyłożone siły powodują przesuwanie dwóch płaszczyzn względem siebie.
Siła ścinająca działająca na odcinek lędźwiowy usiłuje przemieścić górny krąg do przodu względem kręgu leżącego poniżej (przesunąć w kierunku tylno-przednim) (ryc.29) [8].
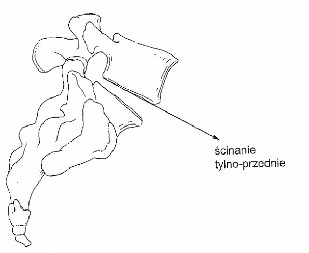
Ryc.29 Tylno-przednie ścinanie na poziomie L5/S1 [8].
Strukturami anatomicznymi, które opierają się tej sile są wyrostki stawowe dolne i górne (wyrostki stawowe dolne wklinowują się w wyrostki stawowe górne kręgu leżącego poniżej).
Na poziomie L5/S1 sile tej opiera się także więzadło biodrowo-lędźwiowe.
Jednak podczas dużego obciążenia oraz w dynamice, w odcinku lędźwiowym mogą pojawić się również siły ścinające przednie (przednio-tylne).
Wtedy stabilizacja odcinka lędźwiowego wymaga połączenia ryglowania samoistnego (przez strukturę) oraz ryglowania wymuszonego (działanie mięśni).
Mechanizm stabilizujący musi tak rozłożyć siły ściskające i ścinające działające na układ, aby nie przekraczały one wytrzymałości stawów i struktur je otaczających.
Elementy, które odgrywają zasadniczą rolę w tym mechanizmie to powięź piersiowo-lędźwiowa oraz mięśnie ją napinające/pod jej wpływem napinane.
Dzięki bezpośrednim połączeniom mięśnia poprzecznego brzucha zarówno z blaszką powierzchowną jak i warstwą środkową powięzi piersiowo-lędźwiowej oraz z wyrostkami poprzecznymi wszystkich kręgów lędźwiowych, jest to mięsień, który posiada korzystne warunki dla uzyskani napięcia ograniczającego ścinanie, rotację i translację kręgów lędźwiowych (ryc.30) [8, 13].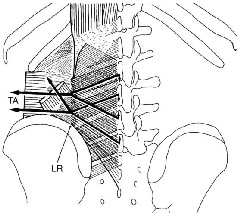
Ryc.30 A- schemat napięcia brzegu bocznego powięzi piersiowo-lędźwiowej (LR) przez mięsień poprzeczny brzucha (TA) [13]. B- model kontroli ruchomości kręgu lędźwiowego przez napięcie mięśnia poprzecznego brzucha i powięzi piersiowo-lędźwiowej [13].
Gracovetsky i Farfan odkryli, że „dla każdego obciążenia, dla minimalnego, skompensowanego napięcia jest uprzywilejowana strefa stabilna w odniesieniu do sytuacji, w której moment siły będzie zrównoważony w trzech równych częściach przez układ mięśniowy, pośrodkowy układ więzadłowy i mięśnie brzucha za pośrednictwem powięzi piersiowo-lędźwiowej” [8].
Badania przeprowadzone w ostatnim czasie (Hodges i Richardson 1996) pokazują, że mięsień poprzeczny brzucha jest najważniejszym mięśniem stabilizującym kręgosłup lędźwiowy.
Powięź piersiowo-lędźwiowa natomiast jest ściśle z nim powiązana. Wzmacnia ona skurcz mięśnia poprzecznego brzucha oraz mięśnia wielodzielnego.
Badanie Hodgesa i Richardsona udowodniło, że przed jakimkolwiek ruchem kończyną górną lub dolną najpierw następuje pobudzenie mięśnia poprzecznego brzucha oraz mięśnia wielodzielnego, a dopiero później zaplanowany ruch.
Elektromiograficzny zapis aktywności mięśni podczas ruchów kończyną górną wyraźnie pokazuje, że zanim nastąpi skurcz mięśnia naramiennego wprowadzającego dany ruch, następuje aktywacja mięśnia poprzecznego brzucha i mięśnia wielodzielnego w celu ustabilizowania kompleksu lędźwiowo-miedniczno-biodrowego [8,13].
Dopiero po uzyskaniu tej centralnej stabilizacji może zostać bezpiecznie wprowadzony ruch na obwodzie.
Taka strategia organizmu dotyczy każdego ruchu.
Jeśli mechanizm centralnej stabilizacji jest niewydolny, często objawia się to bólem w odcinku lędźwiowym kręgosłupa (ryc.31).
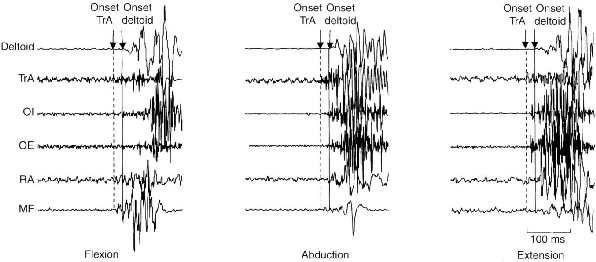
Ryc.31 Elektromiograficzny zapis aktywności mięśni. Kolejność pobudzania w czasie, podczas wykonywania ruchu. Flexion- zgięcia, abduction- przywiedzenia i extension- wyprostu kończyny górnej. Deltoid- mięsień naramienny, TrA- mięsień poprzeczny brzucha, OI- mięsień skośny wewnętrzny brzucha, OE- mięsień skośny zewnętrzny brzucha, RA- mięsień prosty brzucha, MF- mięsień wielodzielny. Onset- początek aktywności mięśnia [13].
Hodges i Richardson (1996) zbadali również, że u pacjentów z przewlekłym „bólem krzyża” znacznie zaburzona jest kontrola motoryczna głównie mięśnia poprzecznego brzucha, a mięsień wielodzielny jest atroficzny z licznymi procesami włóknienia i bliznowacenia
(ryc.32) [8, 13].
Ryc.32 Obraz tomografii komputerowej pacjenta z przewlekłymi dolegliwościami bólowymi lędźwiowego odcinka kręgosłupa. Wyraźnie widoczne są większe zmiany włóknienia i bliznowacenia po lewej stronie pacjenta (po prawej na zdjęciu). Zdrowa, zdolna do skurczu tkanka mięśniowa ma odcień szary, tkanka niezdolna do skurczu jest czarna [13].
Piśmiennictwo:
1. Błaszczyk W.: „Biomechanika kliniczna. Podręcznik dla studentów medycyny i fizjoterapii”. Wydawnictwo Lekarskie PZWL, Warszawa, 2004,
2. Bochenek A., Reicher M.: „Anatomia człowieka. Tom I. Anatomia ogólna, kości, stawy i więzadła, mięśnie”. Wydawnictwo Lekarskie PZWL, Warszawa, 2006,
3. Gnat R., Saulicz E., Kokosz M., Kuszewski M.: „Biomechaniczne aspekty nowoczesnych modeli stabilizacji miednicy. Część I: staw krzyżowo-biodrowy i mechanizm autoryglowania”. „Fizjoterapia Polska”, 2006, 6, 280-288,
4. Gnat R., Saulicz E., Kokosz M., Kuszewski M.: „Biomechaniczne aspekty nowoczesnych modeli stabilizacji miednicy. Część II: spojenie łonowe i przednia ukośna taśma mięśniowa”.
„Fizjoterapia Polska”, 2006, 6, 328-333,
5. Gnat R., Saulicz E., Kuszewski M.: „Współczesne poglądy na temat systemów stabilizacyjnych kompleksu biodrowo-miedniczno-lędźwiowego”. „Fizjoterapia”, 2006, 14, 3,68-81,
6. Gnat R., Saulicz E., Kuszewski M.: „Zaburzenia funkcjonowania systemów stabilizacyjnych kompleksu biodrowo-miedniczno-lędźwiowego”. „Fizjoterapia”, 2006,14,3,83-91,
7. Jorittsma W.: „Anatomia na żywym człowieku. Wstęp do terapii manualnej”. Urban&Partner, Wrocław, 2004,
8. Lee D.: „Obręcz biodrowa”. DB Publishing, 2001,
9. Lee D.: „Principles of the Integrated Model of Function and its Application to the Lumbopelvic-hip Region”
http://dianelee.ca/articles/articles.php,
10. Myers T. W.: „Anatomy trains. Myofacial Meridians for Manual and Movement Therapists”. Churchill Livingstone, 2001,
11. Oatis C. A.: „Kinesiology. The Mechanics and Pathomechanics of Human Movement”. Lippincott Williams & Wilkins, 2004,
12. Perry J.: „ Gait Analysis: Normal and Pathological Function”. Slack Inc 1992,
13. Richardson C., Hodges P. Hides J.: „Therapeutical Exercise for Lumbopelvic Stabilization. A Motor Control Approach for the Treatment and Prevention of Low Back Pain”. Churchill Livingstone, 2004.
Przygotował : Bartosz Kmita



